Motion Detection with Nicla Voice and Machine Learning Tools
Learn how to create a simple motion detection application with the Arduino® Nicla Voice and the Arduino Cloud Machine Learning Tools powered by Edge Impulse®.
Overview
The Nicla Voice is a versatile board that can be used for various projects and applications. With its onboard Inertial Measurement Unit (IMU) and Tiny Machine Learning (TinyML), the Nicla Voice board provides an ideal device for the application described in this tutorial: a simple motion detection application.
The simple motion detection application will be based on a TinyML model developed with the Arduino Cloud Machine Learning Tools powered by Edge Impulse®, a leading platform in developing intelligent devices and a powerful facilitator for TinyML applications. With the Machine Learning Tools, we will capture data from your Nicla's Voice onboard IMU, create and train a TinyML model specifically designed for motion detection, and deploy it into the board for testing and validation. By the end of this tutorial, you will have a fully functional motion detection application running on your Nicla Voice board and a solid foundation in applying TinyML to real-world applications.
Goals
- Understand the key features and capabilities of the Nicla Voice board.
- Set up a Nicla Voice board and prepare it for developing of a motion detection application.
- Become familiar with the Machine Learning Tools integration of the Arduino Cloud, its interface, and its key features.
- Collect motion data from the Nicla Voice board's onboard IMU using using the Arduino Cloud Machine Learning Tools.
- Develop, train, and validate a TinyML model designed for motion detection using the Machine Learning Tools.
- Deploy the trained TinyML model onto the Nicla Voice board and test its real-time motion detection capabilities.
- Gain practical experience and foundational knowledge in developing TinyML applications for real-world scenarios.
Hardware and Software Requirements
Hardware Requirements
- Nicla Voice (x1)
- Micro-USB cable (x1)
Software Requirements
- Arduino IDE 2.0+, or Arduino Web Editor
- To create custom Machine Learning models, the integrated Machine Learning Tools of the Arduino Cloud are needed. In case you do not have an Arduino Cloud account, you will need to create one first.
Motion Detection and TinyML
Motion detection technology, which identifies and measures physical movement, is vital in many fields. The precision and scope of motion detection can be significantly improved by using an IMU, an advanced device designed to capture the force and angular velocity. This enhanced capability is important in real-world applications such as wearable fitness trackers, vehicle safety and navigation systems, and robotic movement controls.
Within this context, TinyML emerges as a transformative new force. As a specialized branch of Machine Learning, TinyML was explicitly developed for devices with limited computational power, such as microcontrollers. Despite its compact nature, TinyML brings robust Machine Learning capabilities without imposing significant power or computational burdens. Its essence lies in converting raw data into actionable insights. A TinyML model can discern specific movements and irregularities by interpreting patterns from the IMU data, empowering a device to interact dynamically with its environment.
For the development process in this tutorial, we'll employ the Machine Learning Tools, an great platform for TinyML application development. This platform features an interesting suite of tools for data acquisition, model design, model training, and deploying our motion detection model on the Nicla Voice board. This approach facilitates the design and implementation of complex models directly on the board. By combining the capabilities of the Nicla Voice board, the advantages of an IMU-based motion detection model, and the versatility of a platform like the Arduino Cloud, this tutorial aims to provide an exhaustive perspective on constructing tangible real-world applications.
Instructions
Creating an Arduino Cloud Account
First, if you still need a Cloud account, please create one here. You can then access the Machine Learning Tools integration via your Cloud account, as shown in the image below.
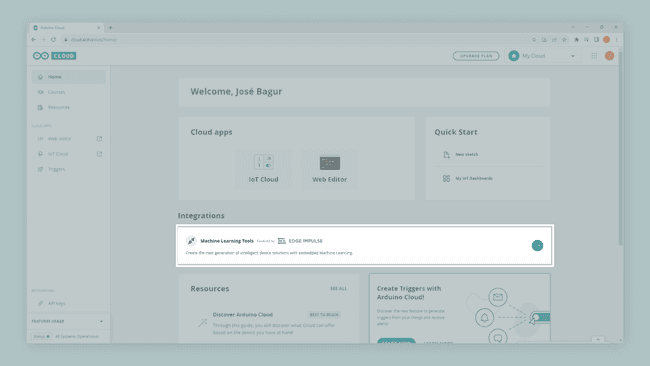
With your account set up and running, create a new project. With your new project created, we are ready to capture data for your motion detection model.
IMU Data Capture with the Machine Learning Tools®
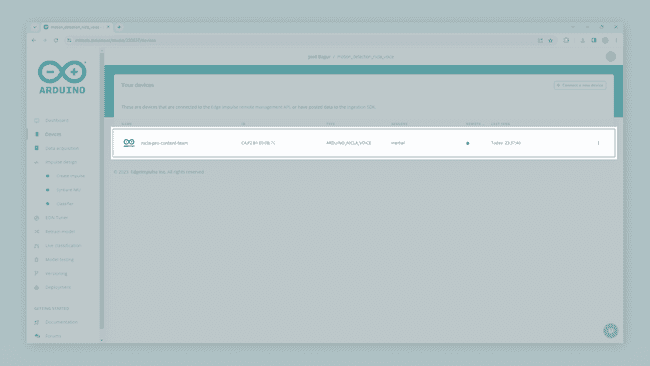
We can capture data from the onboard IMU of the Nicla Board using the Machine Learning Tools. To do this, check out the following article from Edge Impulse® documentation. Follow the steps described in the article to connect your Nicla Voice board to the Machine Learning Tools; when your board is connected, under the Devices tab on the left side of the window, you should see your it as shown in the image below (green dot):
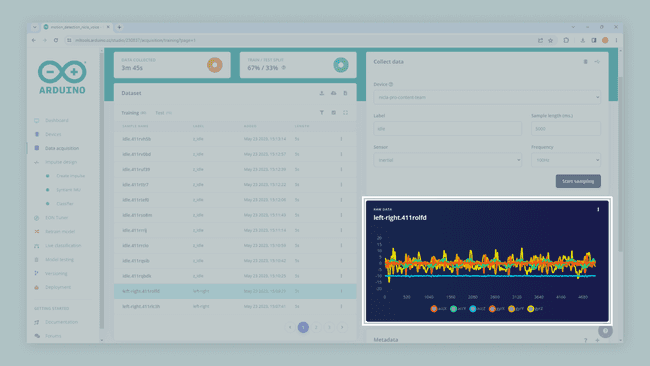
You can now start collecting IMU data with your Nicla Voice board connected to your Cloud account via its Machine Learning Tools integration. In the Machine Learning Tools, go to the Data acquisition tab on the left side of the window. Data acquisition is the tool from the Machine Learning Tools where IMU data can be sampled and stored. To sample new data, go to the Collect data window.
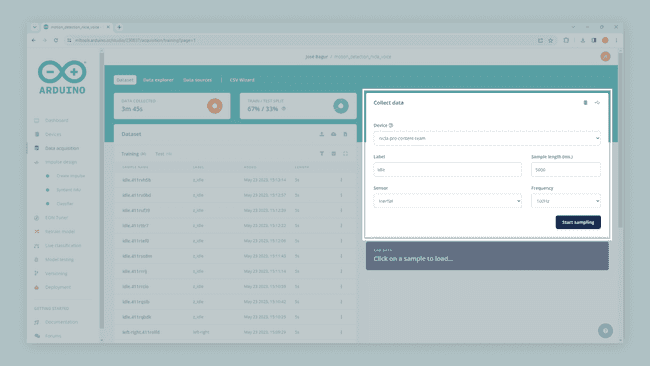
Select your Nicla Voice board, set the label to
left-right5000Inertial100Hzleft-right
After the sampling and storing process is finished, you should see a new line under the Collected data window; when the data is selected, the raw sampled data is graphed as shown in the image below.
Let's repeat the process but for a different type of movement. Set the label to
up-down5000Inertial100Hz
Now its time to build the dataset for the motion detection application using the following three classes:
: horizontal movements, from left to right.left-right
: vertical movements, starting up and going down.up-down
: random movements that are not from left to right or starting up and going down.z-idle
The Syntiant NDP processors require a negative class on which no predictions will occur; in our application, this is the
class. Make sure the negative class name is last in alphabetical order.z_idle
Split your data into training, test, and validation sets; a common split ratio is 70% for training, 15% for testing, and 15% for validation. For demonstration purposes, record around four minutes of data per class; in this case, you need to allocate approximately the following amounts of data for each set:
- Training: 2.8 minutes (70% of 4 minutes).
- Testing: 0.6 minutes (15% of 4 minutes).
- Validation: 0.6 minutes (15% of 4 minutes).
The number of samples required for a motion detection model depends on several factors. There is no one-size-fits-all answer, but some general guidelines to determine the appropriate sample size are the following:
- Data complexity: With complex patterns, larger sample size.
- Type of motion detection technique: Supervised methods require more samples than unsupervised methods.
- Model performance: More data is only sometimes better.
- The rarity of movements: A larger sample size is needed if anomalies are rare events.
As a starting point, consider that you will need more samples, at least several hundred to a few thousand, for a more robust model.
Impulse Design
With the training dataset captured, you can design an impulse; an impulse takes raw data, uses signal processing to extract features, and then uses a learning block to classify new data. Signal processing blocks always return the same values for the same input and are used to make raw data easier to process, while learning blocks learn from past experiences.
In this tutorial, we are going to use the following processing blocks:
- IMU Syntiant processing block: This block prescales raw data to 8-bit values to match Nicla's Voice NDP processor input requirements.
- Classification learning block: This block takes the generated features and learns to distinguish between different classes (
,left-right
, orup-down
).z-idle
To set both blocks, navigate to the Create impulse tab, select the window size to
600200IMU SyntiantClassification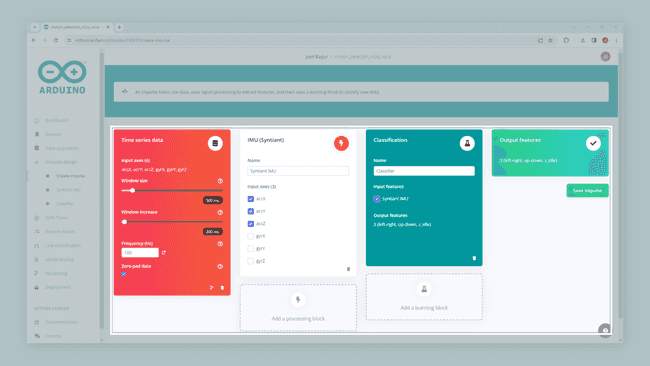
The Syntiant NDP101 processor requires the number of generated features to be divisible by four. In our example, we have three axes sampled at 100 Hz with a 600 ms window leading to 180 (60x3) features divisible by four.
IMU Syntiant Block Configuration
To configure the IMU Syntiant processing block, navigate to the Syntiant IMU tab. You will see the raw data on top of the window (you can select other files via the drop-down menu) and the processed features on the right.
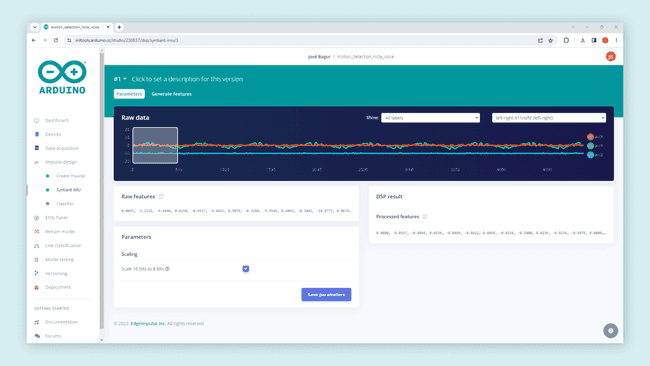
Click the Scale 16 bits to 8 bits option; this converts your raw data to 8-bit and normalizes it to the [-1, 1] range. Then, click the Save parameters button to send you to the Feature generation window. Click the Generate features button on that window to start the feature generation process.
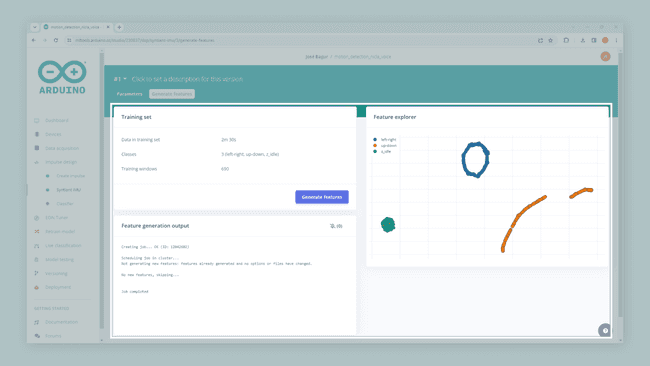
After a while, the Feature explorer window will load. This screen plots all the extracted features against all the generated windows, as shown in the image above; you can use this graph to compare your complete data set. A good rule of thumb is that if you can visually separate the data on several axes, then the Machine Learning model will also be able to do so.
Classification Block Configuration
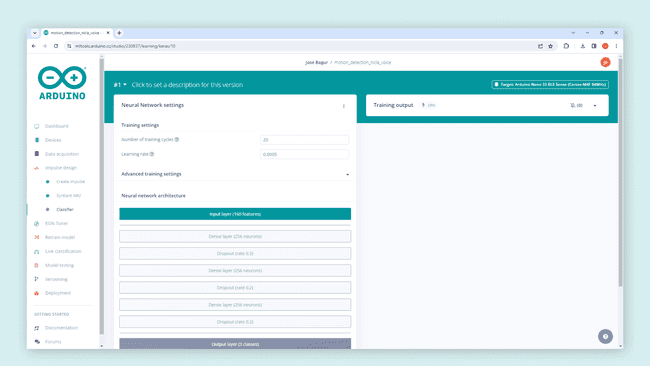
Now, it's time to start training a neural network. Neural networks are algorithms that can learn to recognize patterns in their training data, for example, certain types of movements. The neural network you will train will take the processing block features as input and try to map it to one of the three classes of our model (
left-rightup-downz-idleClick on the Classifier tab, you'll see the following window:
Click the Start training. When it's complete, you'll see the Model performance window appear at the bottom-right of the window:
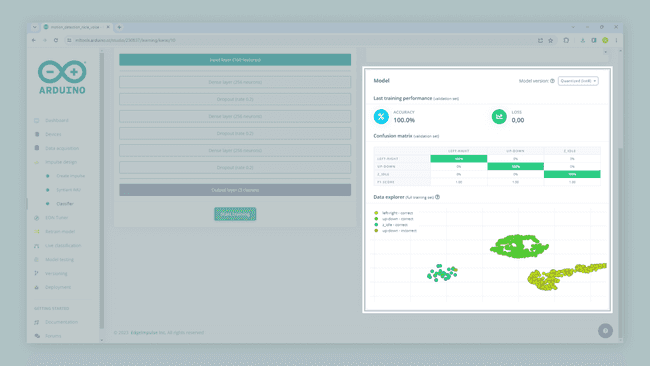
From the Model performance window, we can see the model's accuracy. Accuracy refers to the percentage of windows of movement that were correctly classified; the higher the number, the better. However, an accuracy of 100% is unlikely and often a sign that your model has overfit the training data. For most applications, an accuracy above 85% is very good. The confusion matrix shows the balance of correctly versus incorrectly classified.
Now that you have trained a neural network with the Machine Learning Tools, we are ready to deploy and test it on your Nicla Voice board!
Deploying and Running an Impulse
It's time to test your model on your Nicla Voice board. Click on the Deployment tab, and then under the Search deployment options button, select the Arduino Nicla Voice option as shown below:
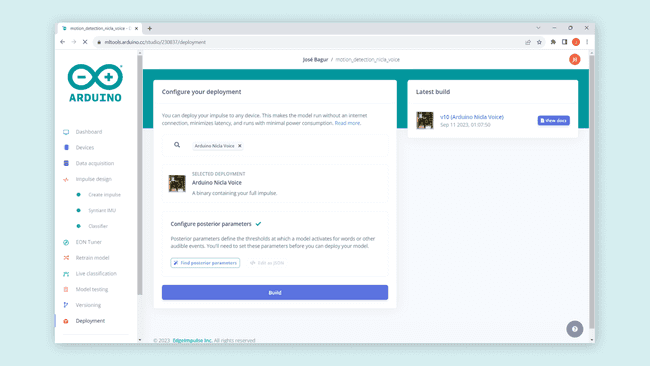
Then, configure posterior parameters to define, for example, thresholds at which your model activates; posterior parameters are used to tune the precision of the neural network activations to minimize the False Rejection Rate and False Activation Rate. Click on the Find posterior parameters button and select the classes you want to detect; make sure to uncheck the last class, in this application, the
z-idle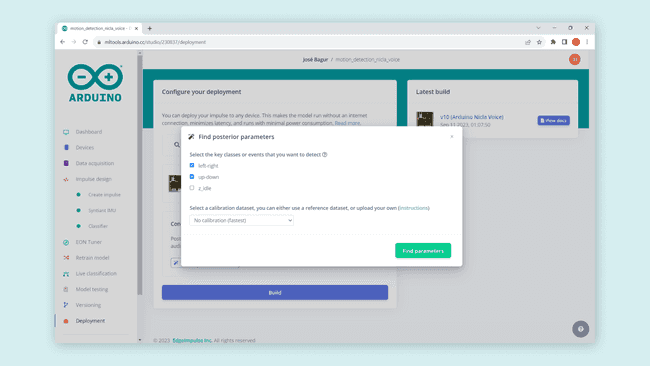
You can also deploy and run your impulse through a library generated by the Machine Learning Tools for the Syntiant NDP101 processor of your Nicla Voice board. This library can also be built in the Deployment tab.
Click on the Build button. This will start a process on which a binary file containing your impulse is built; this file can then be run on your Nicla Voice board. After completing the building process, you'll be prompted to download a
.zip
After unzipping the downloaded file, run the appropriate flashing script for your computer's operating system (Linux, Mac, or Windows) to flash your Nicla Voice board with the motion recognition model and associated firmware.
Running the Model
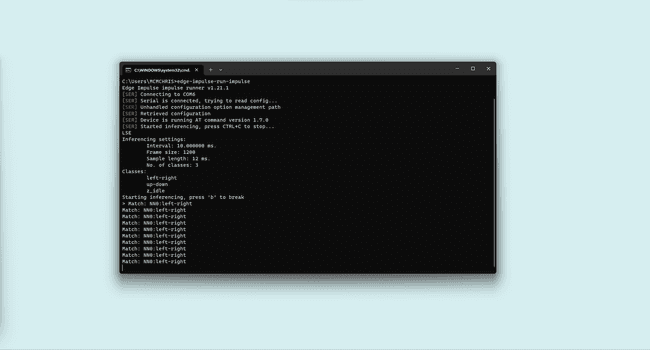
With your Nicla Voice board flashed, open a new terminal window and run the following command:
1edge-impulse-run-impulseThis command will sample data from your Nicla's Voice onboard IMU, make inferences, and then classify the movement made on your board. You should see the following output in the terminal window when your Nicla Voice board is moved in horizontal movements, from left to right.
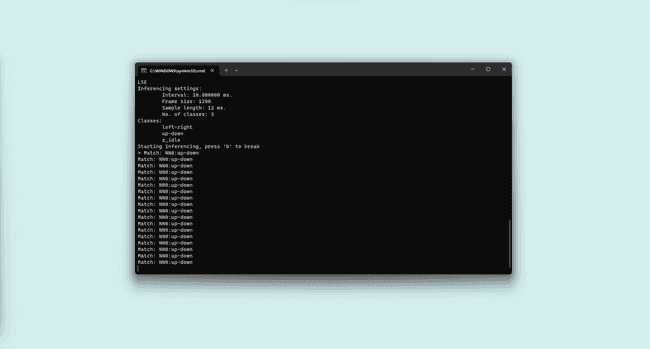
When the board is moved in vertical movements, starting up and going down, you should see the following output in the terminal window:
Conclusion
In this tutorial, you learned how to use your Nicla Voice board with the Machine Learning Tools integration of the Arduino Cloud to develop a simple motion detection application. Not only have you created a simple motion detection application, but you've also laid the groundwork for exploring more advanced and sophisticated applications in the future. You can access the
Next Steps
¿Interested in learning more about Machine Learning or learning about the Nicla Voice hardware and software capabilities? Check out the following tutorials and applications notes:
Suggest changes
The content on docs.arduino.cc is facilitated through a public GitHub repository. If you see anything wrong, you can edit this page here.
License
The Arduino documentation is licensed under the Creative Commons Attribution-Share Alike 4.0 license.