Accessing Accelerometer Data on Nano 33 BLE
Learn how to measure the relative position of the Nano 33 BLE through the LSM9DS1 IMU sensor.
This tutorial will focus on the 3-axis accelerometer sensor of the LSM9DS1 module on the Arduino Nano 33 BLE, in order to measure the relative position of the board. This will be achieved by utilizing the values of the accelerometer's axes and later print the return values through the Arduino IDE Serial Monitor.
Goals
The goals of this project are:
- Understand what an LSM9DS1 module is.
- Use the LSM9DS1 library.
- Read the raw data of the accelerometer sensor.
- Convert the raw data into board positions.
- Print out live data through the Serial Monitor.
Hardware & Software Needed
- This project uses no external sensors or components.
- In this tutorial we will use the Arduino Create Web Editor to program the board.
The LSM9DS1 Inertial Module
IMU stands for: inertial measurement unit. It is an electronic device that measures and reports a body's specific force, angular rate and the orientation of the body, using a combination of accelerometers, gyroscopes, and oftentimes magnetometers. In this tutorial we will learn about the LSM9DS1 IMU module, which is included in the Arduino Nano 33 BLE Board.
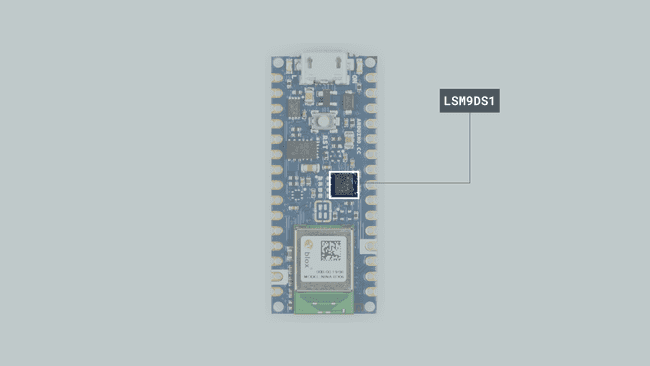
The LSM9DS1 is a system-in-package featuring a 3D digital linear acceleration sensor, a 3D digital angular rate sensor, and a 3D digital magnetic sensor.
The LSM9DS1 Library
The Arduino LSM9DS1 library allows us to use the Arduino Nano 33 BLE IMU module without having to go into complicated programming. The library takes care of the sensor initialization and sets its values as follows:
- Accelerometer range is set at [-4, +4]g -/+0.122 mg.
- Gyroscope range is set at [-2000, +2000] dps +/-70 mdps.
- Magnetometer range is set at [-400, +400] uT +/-0.014 uT.
- Accelerometer output data rate is fixed at 104 Hz.
- Gyroscope output data rate is fixed at 104 Hz.
- Magnetometer output data rate is fixed at 20 Hz.
If you want to read more about the LSM9DS1 sensor module see here.
Accelerometer
An accelerometer is an electromechanical device used to measure acceleration forces. Such forces may be static, like the continuous force of gravity or, as is the case with many mobile devices, dynamic to sense movement or vibrations.
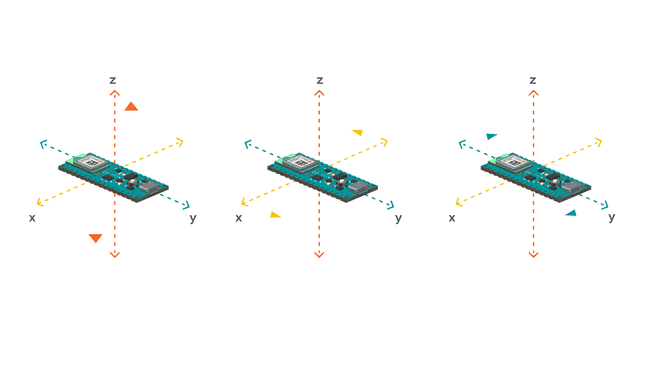
In this example, we will use the accelerometer as a "level" that will provide information about the position of the board. With this application we will be able to read what the relative position of the board is as well as the degrees, by tilting the board up, down, left or right.
Creating the Program
1. Setting up
Let's start by opening the Arduino Web Editor, click on the Libraries tab and search for the LSM9DS1 library. Then in > Examples, open the SimpleAccelerometer sketch and once it opens, rename it as Accelerometer.

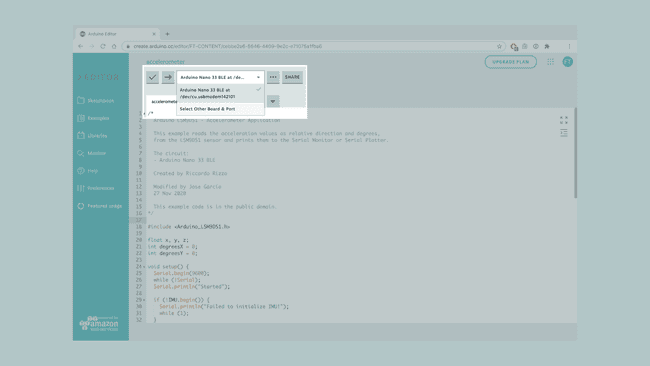
2. Connecting the board
Now, connect the Arduino Nano 33 BLE to the computer and make sure that the Web Editor recognizes it, if so, the board and port should appear as shown in the image below. If they don't appear, follow the instructions to install the plugin that will allow the Editor to recognize your board.
3. Printing the relative position
Now we will need to modify the code on the example, in order to print the relative position of the board as we move it in different angles.
Let's start by initializing the the x, y, z axes as
floatint degreesX = 0;int degreesY = 0;setup()In the
setup()1Serial.println();2Serial.println("Acceleration in G's");3Serial.println("X\tY\tZ");Since the raw values of the three axes will not be required, we can remove the lines which will print these. Similarly, we should remove the following lines from the
loop()1Serial.print(x);2Serial.print('\t');3Serial.print(y);4Serial.print('\t');5Serial.println(z);Instead, in the
loop()After the
IMU.readAccelerationif1if(x > 0.1){2 x = 100*x;3 degreesX = map(x, 0, 97, 0, 90);4 Serial.print("Tilting up ");5 Serial.print(degreesX);6 Serial.println(" degrees");7 }8 if(x < -0.1){9 x = 100*x;10 degreesX = map(x, 0, -100, 0, 90);11 Serial.print("Tilting down ");12 Serial.print(degreesX);13 Serial.println(" degrees");14 }15 if(y > 0.1){16 y = 100*y;17 degreesY = map(y, 0, 97, 0, 90);18 Serial.print("Tilting left ");19 Serial.print(degreesY);20 Serial.println(" degrees");21 }22 if(y < -0.1){23 y = 100*y;24 degreesY = map(y, 0, -100, 0, 90);25 Serial.print("Tilting right ");26 Serial.print(degreesY);27 Serial.println(" degrees");28 }Lastly, we
Serial.printdelay(1000);Note: For the following code to properly work, the board's facing direction and inclination during the initialization of the code, need to be specific. More information will be shared on the "testing it out" section.
4. Complete code
If you choose to skip the code building section, the complete code can be found below:
1/*2 Arduino LSM9DS1 - Accelerometer Application3
4 This example reads the acceleration values as relative direction and degrees,5 from the LSM9DS1 sensor and prints them to the Serial Monitor or Serial Plotter.6
7 The circuit:8 - Arduino Nano 33 BLE9
10 Created by Riccardo Rizzo11
12 Modified by Jose García13 27 Nov 202014
15 This example code is in the public domain.16*/17
18#include <Arduino_LSM9DS1.h>19
20float x, y, z;21int degreesX = 0;22int degreesY = 0;23
24void setup() {25 Serial.begin(9600);26 while (!Serial);27 Serial.println("Started");28
29 if (!IMU.begin()) {30 Serial.println("Failed to initialize IMU!");31 while (1);32 }33
34 Serial.print("Accelerometer sample rate = ");35 Serial.print(IMU.accelerationSampleRate());36 Serial.println("Hz");37}38
39void loop() {40
41 if (IMU.accelerationAvailable()) {42 IMU.readAcceleration(x, y, z);43
44 }45
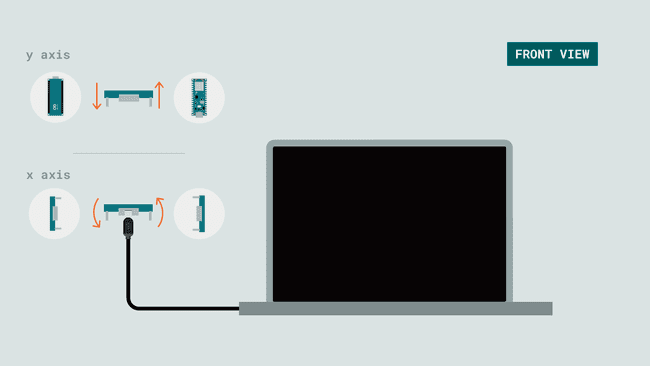
46 if (x > 0.1) {47 x = 100 * x;48 degreesX = map(x, 0, 97, 0, 90);49 Serial.print("Tilting up ");50 Serial.print(degreesX);51 Serial.println(" degrees");52 }53 if (x < -0.1) {54 x = 100 * x;55 degreesX = map(x, 0, -100, 0, 90);56 Serial.print("Tilting down ");57 Serial.print(degreesX);58 Serial.println(" degrees");59 }60 if (y > 0.1) {61 y = 100 * y;62 degreesY = map(y, 0, 97, 0, 90);63 Serial.print("Tilting left ");64 Serial.print(degreesY);65 Serial.println(" degrees");66 }67 if (y < -0.1) {68 y = 100 * y;69 degreesY = map(y, 0, -100, 0, 90);70 Serial.print("Tilting right ");71 Serial.print(degreesY);72 Serial.println(" degrees");73 }74 delay(1000);75}Testing It Out
In order to get a correct reading of the board data, before uploading the sketch to the board hold the board in your hand, from the side of the USB port. The board should be facing up and "pointing" away from you. The image below illustrates the board's position and how it works:
Now, you can verify and upload the sketch to the board and open the Monitor from the menu on the left.
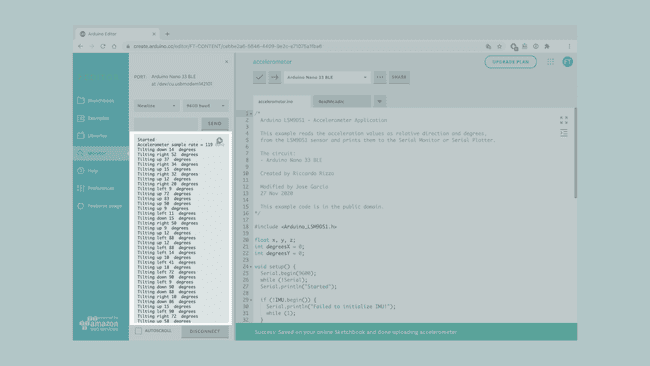
If you tilt the board upwards, downwards, right or left, you will see the results printing every second according to the direction of your movement!
Here is a screenshot of the sketch returning these values:
Troubleshoot
Sometimes errors occur, if the code is not working there are some common issues we can troubleshoot:
Missing a bracket or a semicolon.
Arduino board connected to the wrong port.
Accidental interruption of cable connection.
The initial position of the board is not as instructed. In this case you can refresh the page and try again.
Conclusion
In this simple tutorial we learned what an IMU sensor module is, how to use the LSM9DS1 library, and how to use an Arduino Nano 33 BLE to get data. Furthermore, we utilized the 3-axis accelerometer sensor, in order to measure and print out the degrees and relative position of the board.
Suggest changes
The content on docs.arduino.cc is facilitated through a public GitHub repository. If you see anything wrong, you can edit this page here.
License
The Arduino documentation is licensed under the Creative Commons Attribution-Share Alike 4.0 license.